The overall objective of the CART project is to improve traffic safety and performance by enabling trustworthy information sharing and coordination through a dependable digital infrastructure.
We believe that an important means to reach this objective is to pave the way for an open testing environment for connected, collaborative and automated road traffic. The vision of an open research testing environment is illustrated below, enabling configuration of various types of supporting digital infrastructure and road scenarios, and where assets are provided by KTH and partners. The testing environment, from simulation to on-road trials, will support the evaluation of concepts, data gathering, validation of research and at the same time serve education of engineers and industry. The scope of automated road traffic will initially be limited to an operational design domain (ODD) encompassing selected KTH campus Valhallavägen roads, driving at low speeds with a safety operator and in favorable weathers.
The CART project will collaborate with the TECoSA SMEDE project and exchange experiences with the TECoSA COLA project while striving to develop use-cases that leverage both testbeds.
More detailed project goals include to,
- develop new algoritms, architectures and methods to improve traffic safety and performance, by enabling trustworthy information sharing, collaboration, and edge off-loading. The solutions will need to deal with potentially emerging safety risks and tradeoffs relating to end-to-end performance, cybersecurity, other trustworthiness aspects (e.g. privacy and fairness) and cost.
- integrate the (edge and communication) testbed as an enabler for connected, collaborative and automated road traffic, to:
- perform selected demonstrations
- support experiments and evaluation in the longer term, from algorithms, use of innovative components (e.g. sensors) to architectural aspects.
- provide an arena for education (internships, thesis, projects, competitions), innovation and strategic collaboration in the area.
Illustration of vision
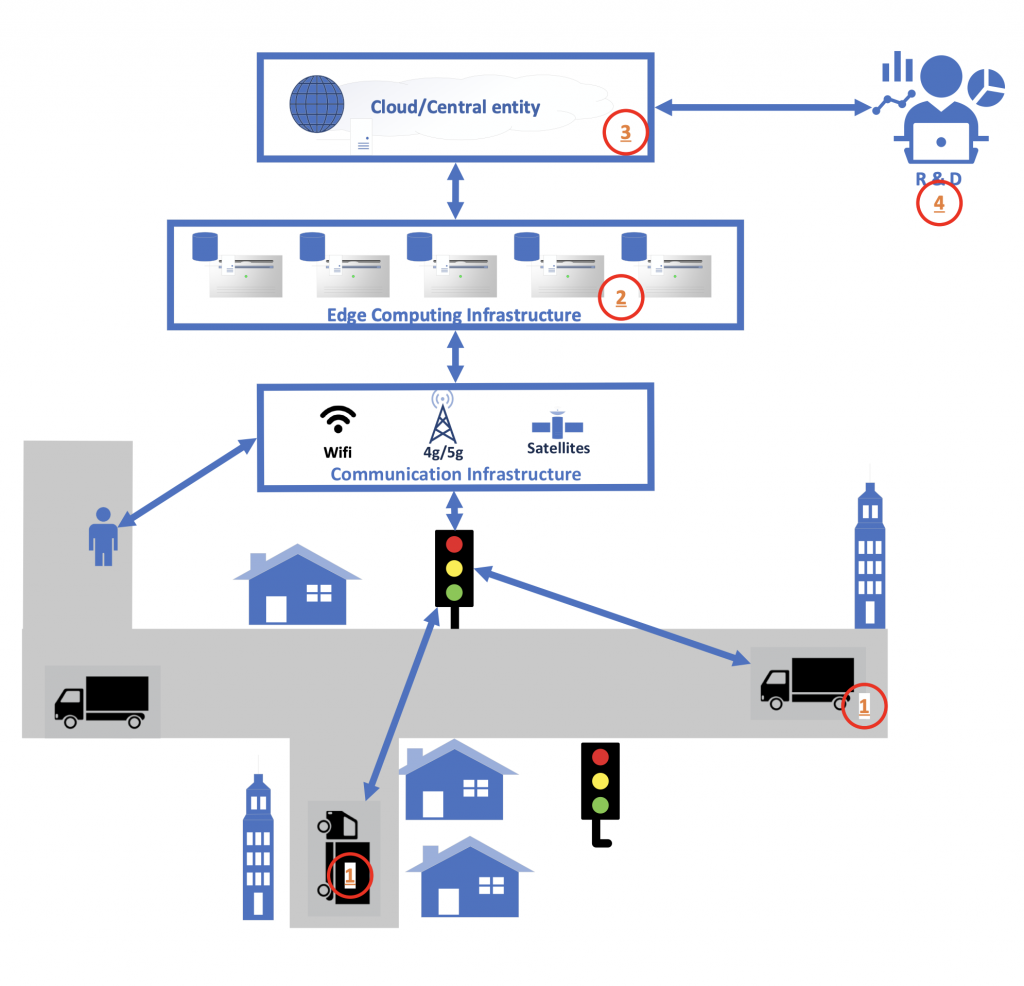
Contributed testbed assets (KTH & partners)
• Edge compute and communications
• Road vehicles
• Sensors, SW, models
Reference implementation
(capabilities, interfaces)
Experiment users
Providing scenarios and performing experiments